| Robotique > Les robots au CEPTA > Saison 2003-2004 (IRIS 3) Résumé de tout ce qu'il faut pour écrire un programme de simulation 3D en openGL Ce qui suit est une vision personnelle. J'ai appris à utiliser openGL depuis peu et je ne prétend pas tout savoir. Je peux simplement expliquer comment j'ai fait pour écrire notamment quelques petits programmes de simulation de matches de robots ou de représentation d'un robot en 3D. J'ai utilisé les logiciels suivants:
Pour aller plus loin dans le réalisme, mais d'un abord un peu plus délicat, il serait bon de jeter un coup d'oeil à ce qu'a développé Mattias Fagerlund: Delphi ODE. ODE s'utilise de pair avec GLscene, mais leur cohabitation est difficile à concilier au début... Même sans programmer, n'hésitez pas à télécharger les démos. C'est très impressionnant, mais il faut un bon PC et mieux, une bonne carte graphique.
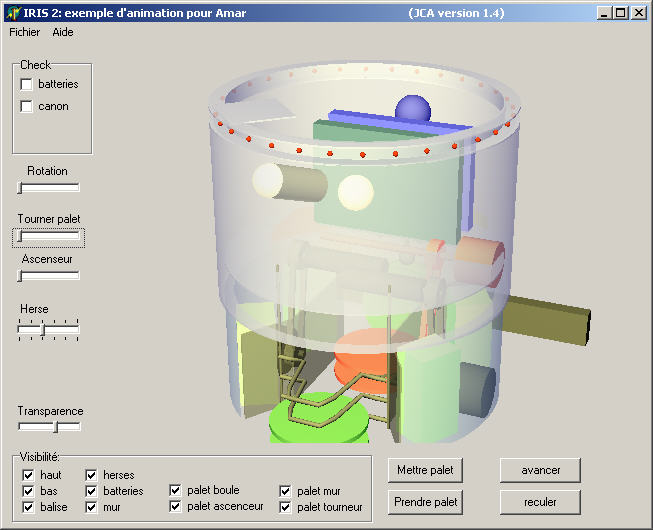
Iris 2 en 3D Voici d'abord un exemple de contruction d'un robot. Il s'agit d'Iris 2 dans sa version quasiment définitive (environ 2 mois avant Eurobot). Il manque certains éléments et d'autres n'ont pas été intégrés (par exemple herse avec boule pour prendre les palets à cheval sur les bords). Programme
à télécharger: modele3Dfinal.exe
avec les sources modele3Dfinal.zip
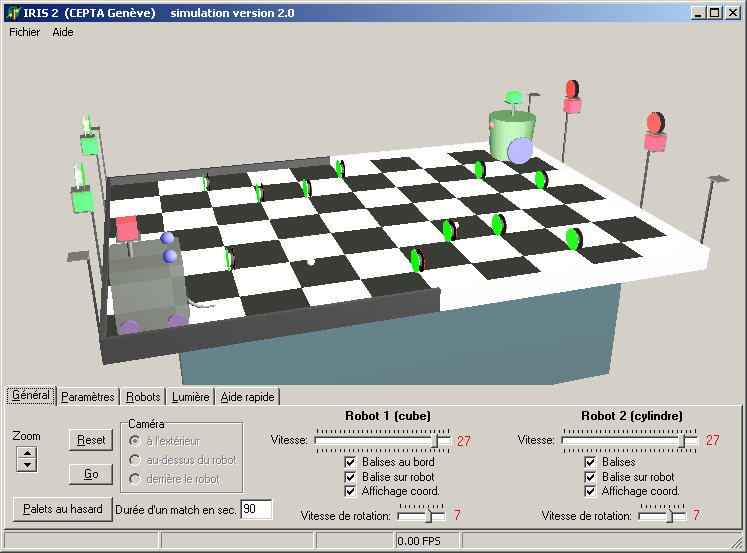
Version simplifiée d'un programme de simulation de matches Ce
2ème exemple est un "simulateur" de matches entre deux
robots. Il contient quelques bugs, mais permet de voir différents
aspects que n'aborde pas le programme ci-dessus. Programme à télécharger:
iris2_v20.exe avec les sources
iris2_v2.0.zip
|